Building a UWB Localization Mesh


UWB Localization Mesh for Spatial Audio
In collaboration with Bang & Olufsen, we built a UWB (Ultra‑Wideband) localization middleware that turns raw, noisy RF ranging measurements into a live, high‑resolution 2D position of a listener moving through their home. The goal was simple but demanding: make high‑end speakers feel “aware” of where you are, allowing us to power novel user experiences.
Instead of treating UWB as a single device feature, the project leverages the distributed speakers to form a localization mesh. A pose‑graph optimization backend fuses Time‑of‑Flight (ToF) and Angle‑of‑Arrival (AoA) measurements from multiple anchors, rejects bad data in real time, and outputs a smooth, globally consistent user pose.
The end result is a middleware layer that:
- Improves positioning accuracy by ~32% over a single‑anchor baseline
- Reduces mean error by 3–4× through multi‑anchor fusion and outlier rejection
- Delivers sub‑20cm accuracy, robust enough for real‑time UX like follow‑me audio sweet spots
Why build this software?
Our middleware acts as a spatial “truth layer” that any application can subscribe to:
- Audio engines can place the listener in a virtual soundstage and steer sweet spots dynamically.
- Multi‑room controllers can crossfade between speakers as you walk between zones.
- Future apps—AR, gaming, asset tracking—can all share the same precise indoor coordinate frame.
Here's a demonstration of the middleware in action, showing real-time tracking of user movement with sub-20cm accuracy:
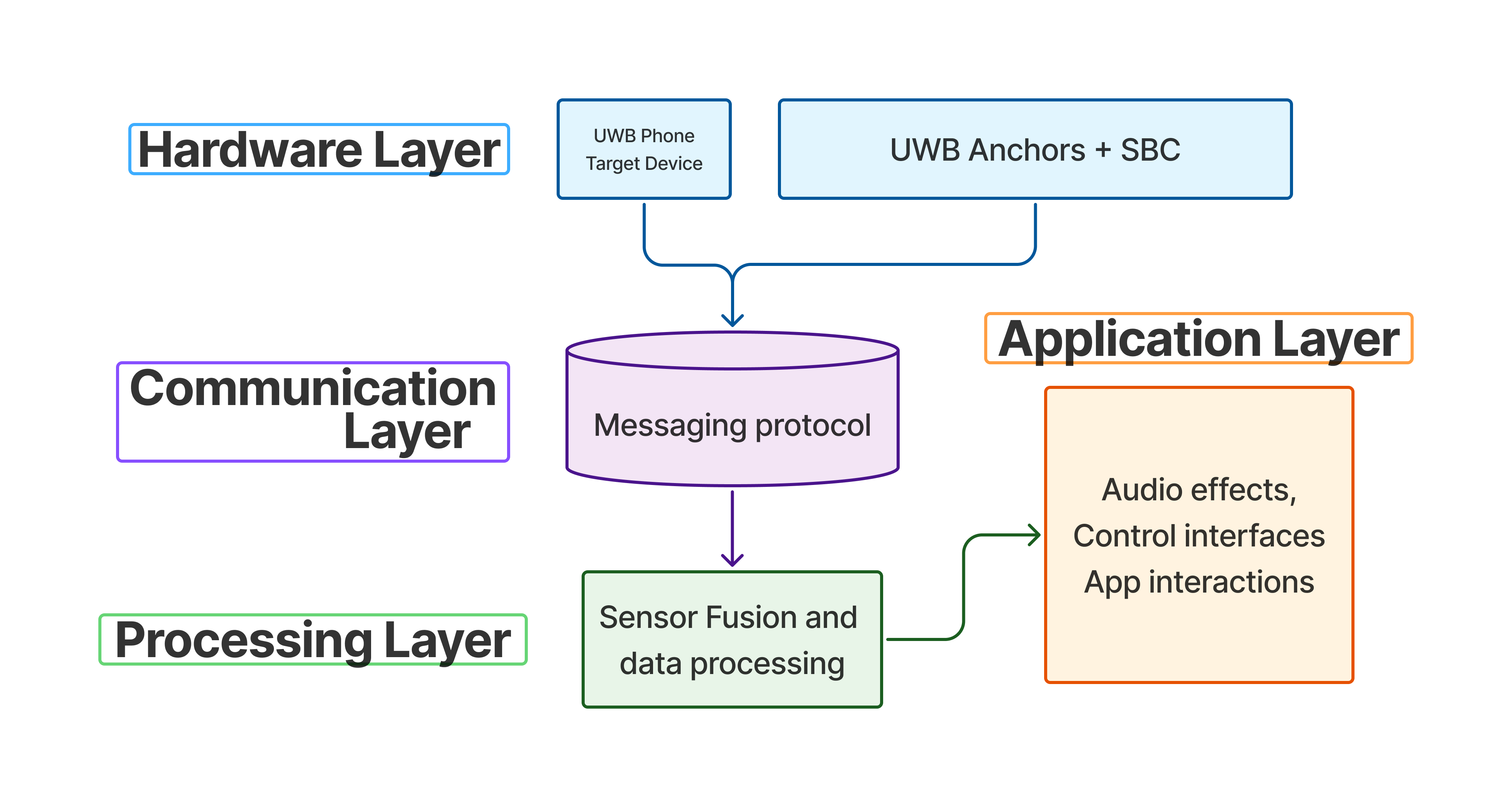
System Architecture: Three-Layer UWB Middleware
At a high level, the system is split into three layers: Edge, Communication, and Processing.
1. Edge Layer — Anchors and Raw UWB Sensing
The edge layer consists of multiple ceiling‑mounted UWB anchors:
- NXP Qorvo Type‑2BP UWB modules provide ToF and AoA measurements to a mobile device (e.g. iPhone).
- Each module is attached to a Raspberry Pi 4B that:
- Configures the UWB radio
- Reads raw measurements
- Packages them into well‑defined messages for the network
- 45° ceiling mounts are used to maximize coverage and signal quality across the listening area.
Each anchor is intentionally stateless beyond its own health and calibration; all global reasoning happens upstream.
2. Communication Layer — MQTT Pub/Sub Mesh
To keep anchors loosely coupled, we use an MQTT publish–subscribe architecture:
- Each anchor publishes measurement packets (ranges, AoA, timestamps, anchor ID) to topics on a central MQTT broker.
- The broker runs on a central processing server and can span:
- Single‑room deployments (e.g. 4 anchors in a living room)
- Multi‑room setups with MQTT bridging and additional anchors
- New anchors can be added or removed without changing the core server code—they just start publishing to the right topics.
This decoupling makes the system scalable and resilient: if one anchor loses line of sight or goes offline, others continue to contribute cleanly.
3. Processing Layer — Pose Graph Optimization Engine
The processing layer is where noisy, partial measurements become a clean global pose estimate:
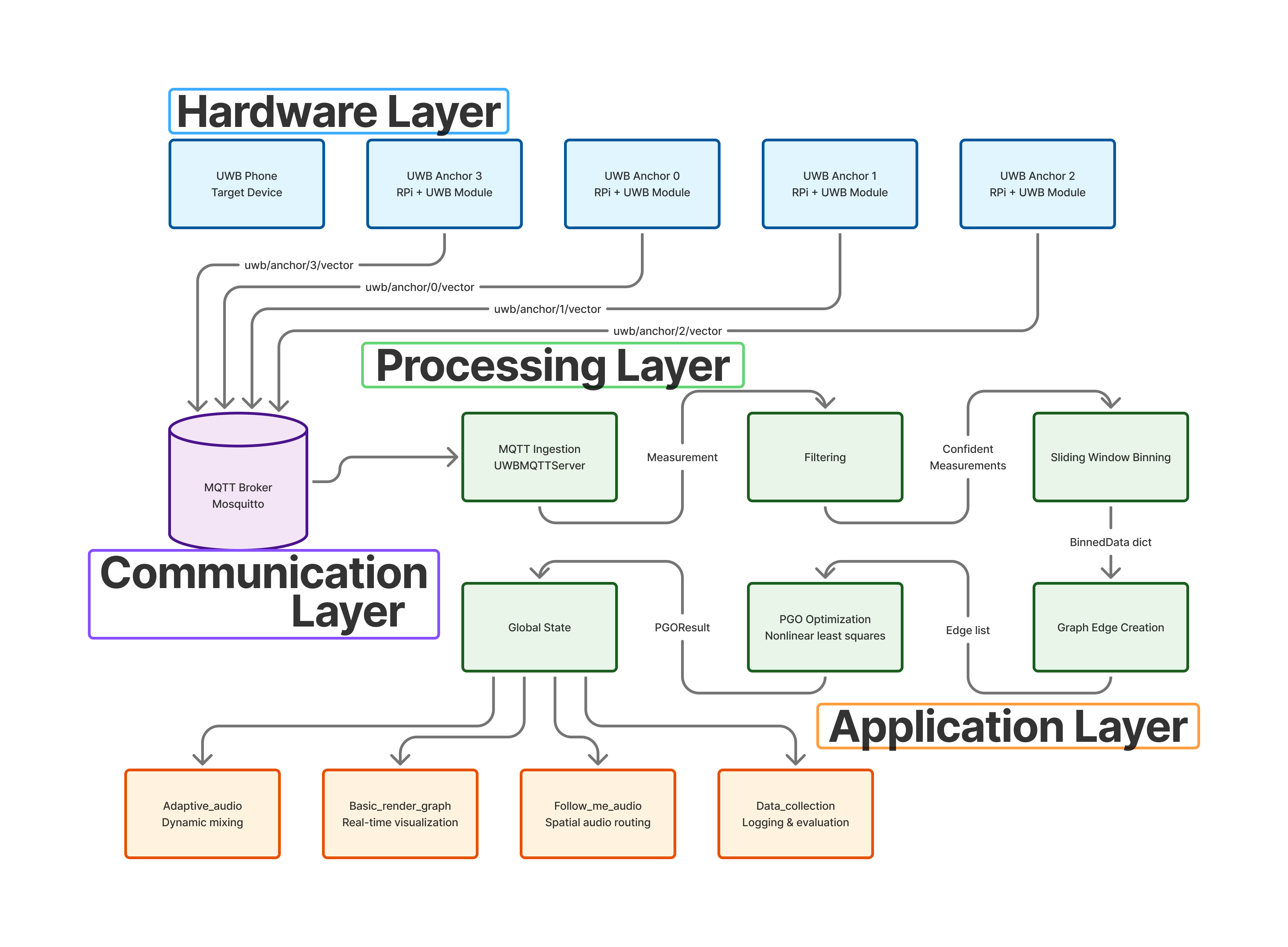
The pipeline:
- Data Ingestion MQTT clients subscribe to anchor topics and ingest raw UWB measurements.
- Preprocessing & Outlier Rejection Statistical filters reject obviously wrong readings (~10% of data), preventing single bad measurements from corrupting the estimate.
- Sliding Window Smoothing A ~2‑second sliding window averages measurements, trading negligible latency for a large drop in noise.
- Pose Graph Optimization (PGO)
- Anchors and the user device are modeled as nodes in a pose graph.
- Ranging/AoA measurements become edges with associated noise models.
- The optimizer adjusts node positions to minimize the global residual error across all edges.
- Dynamic Anchor Gating Anchors with consistently high variance are temporarily disabled so they stop polluting the global solution.
- Real-Time Position Output The system publishes a time‑stamped user pose (and uncertainty) for any downstream applications to consume.
This design gives us:
- Accuracy: Multi‑anchor fusion and PGO shrink error by 3–4×.
- Stability: Sliding windows and outlier rejection kill jitter and wild spikes.
- Robustness: Dynamic gating handles sick anchors gracefully, rather than collapsing the entire estimate.
Algorithms and Performance: Making UWB Actually Useful
Raw UWB is messy: multipath, occlusions, and orientation‑dependent nulls can all blow up individual range estimates. The middleware is intentionally conservative:
- Sliding window averaging smooths high‑frequency noise without sacrificing responsiveness.
- Outlier rejection drops the worst ~10% of measurements before they reach the optimizer.
- Dynamic anchor disabling removes anchors whose variance spikes beyond configured thresholds.
Across multiple phone orientations, we consistently see:
- ~32% accuracy improvement vs. the worst‑anchor baseline
- Tighter error bars as more anchors are added (from 1 to 4), with standard error shrinking significantly
In practice, this means the user’s icon on a floor‑plan view stays glued to where they actually are, instead of jumping around as RF conditions change.
Application Layer: Turning Coordinates into Experiences
Once you have a robust, real‑time position stream, you can start asking a much more interesting question: “What should the system do because the user is here right now?”
Adaptive Multi-Room Speaker Handover
In a multi‑room deployment:
- The house is partitioned into zones (e.g. living room, kitchen, hallway).
- As the user crosses zone boundaries, the controller:
- Crossfades audio between speakers
- From the user’s perspective, the music simply follows them without taps, pairing, or manual device switching.
Zone-Based Audio Interfaces
We also built a zone‑based audio demo, where each area has its own playlist or profile:
Walking between zones becomes a kind of spatial interface—your location is effectively an input modality that the system can react to.
Beyond audio, the same middleware can power:
- Smart home automation (lights, HVAC, security reacting to fine‑grained occupancy)
- AR overlays that stay locked to the room, not just to the device
- Indoor asset tracking and navigation in more industrial environments
Engineering the Middleware: From Test Rig to Python Packages
To validate the system, we built a repeatable test rig in a controlled environment:
- Four ceiling‑mounted UWB anchors in a rectangular configuration
- Precisely measured test points and device orientations
- Systematic sweeps of:
- User position within the grid
- Device orientation (portrait/landscape, camera up/down, etc.)
This setup made it possible to:
- Compare raw anchor coordinates vs. fused PGO output
- Quantify error reduction and stability across orientations
- Tune filters, sliding window sizes, and anchor‑gating thresholds
On the software side, the middleware is packaged into clean, side‑effect‑free Python modules:
- Hardware client/server for UWB + MQTT
- Localization algorithms implementing PGO and filters
- Visualization + widgets for real‑time monitoring and app prototyping
Bringing up a full system is intentionally simple—configure MQTT, start the server, and subscribe to the user pose stream from any application process.
What I Took Away
This project sits at the intersection of embedded sensing, real‑time networking, probabilistic optimization, and UX design. A few key lessons:
- Good UX needs good priors: Without a robust spatial truth layer, even the best audio UX ideas fall apart in practice.
- Multi‑anchor fusion > clever single‑device tricks: Once we embraced the “mesh” mindset, accuracy and reliability jumped.
- Architecture is a product decision: The three‑layer design (Edge → MQTT → PGO) wasn’t just neat engineering—it made the system deployable, debuggable, and ready for future applications beyond audio.
Most importantly, the work turned UWB from a spec sheet bullet point into a platform capability: a middleware layer that B&O (or any developer) can build rich, location‑aware experiences on top of.
Full Project Documentation
For comprehensive technical details, you can view the complete project documentation and demos on the GitHub Pages site: View Full UWB Localization Mesh Project
Download Final Report
The complete final report is available for download, this breaks down the entire project as well as the data collection, validation and iterative design process: Download IS313 Final Report PDF